Note
Go to the end to download the full example code.
Force Controlled Center Cracked Specimen#
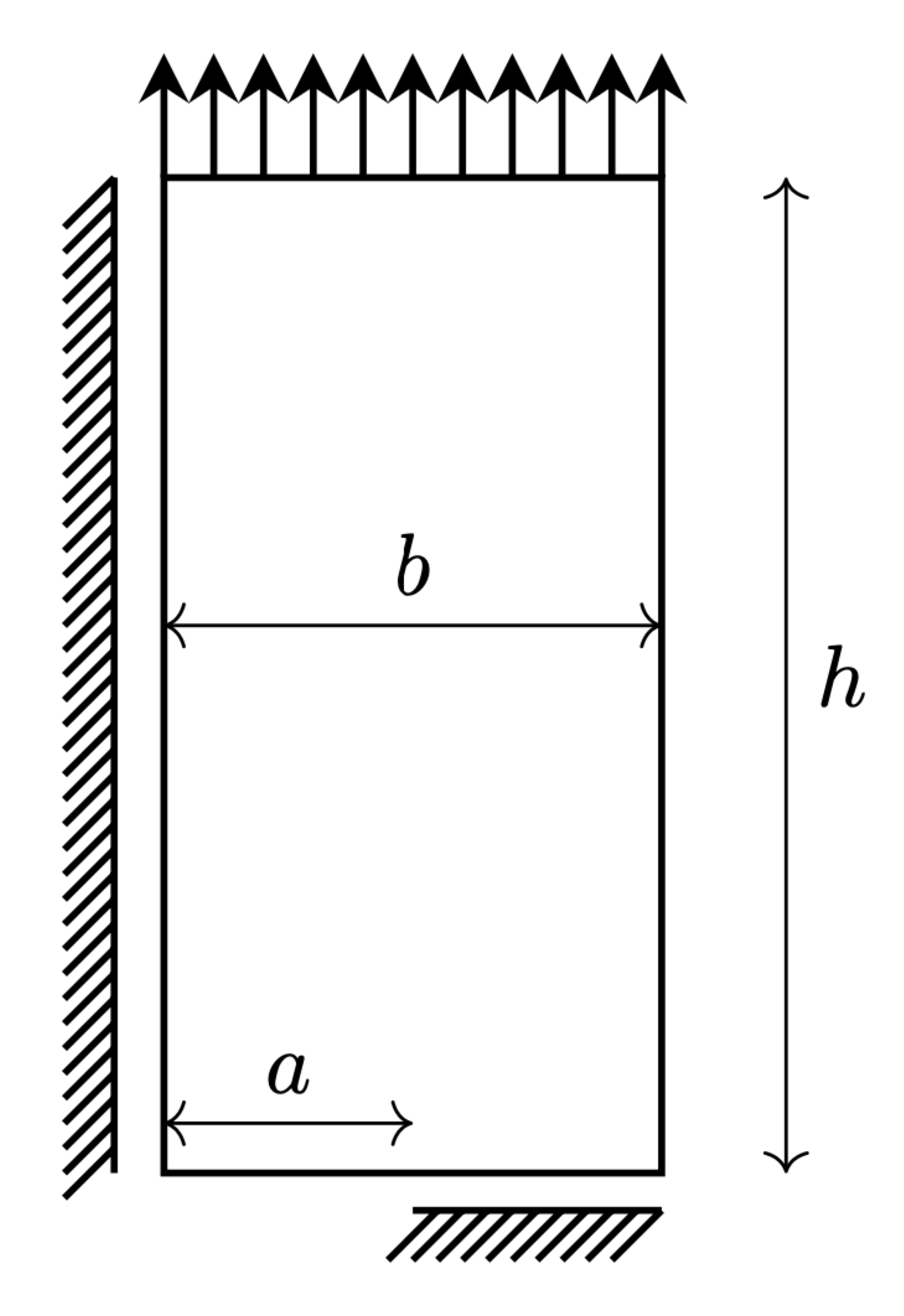
Purely elastic Finite Element model under force loading. To improve computational efficiency, a quarter-symmetry model is employed. The crack is explicitly defined in the mesh by adjusting the boundary conditions. A series of simulations are run, each with a different pre-defined crack length.
# P/\/\/\/\/\/\ P/\/\/\/\/\/\
# |||||||||||| ||||||||||||
# *----------* o|\ *----------*
# | | o|/ | |
# | 2a=a0 | o|\ | a=a0 |
# | ---- | o|/ *----------*
# | | /_\/_\
# | | oo oo oo
# *----------*
# /_\/_\/_\/_\
# |Y /////////////
# |
# *---X
The Young’s modulus, Poisson’s ratio, and the critical energy release rate are given in the table Properties. Young’s modulus \(E\) and Poisson’s ratio \(\nu\) can be represented with the Lamé parameters as: \(\lambda=\frac{E\nu}{(1+\nu)(1-2\nu)}\); \(\mu=\frac{E}{2(1+\nu)}\).
Material Properties#
The material properties are summarized in the table below:
VALUE |
UNITS |
|
|---|---|---|
E |
210 |
kN/mm2 |
nu |
0.3 |
[-] |
Import necessary libraries#
import numpy as np
import pyvista as pv
import pandas as pd
import matplotlib.pyplot as plt
import matplotlib.image as mpimg
import sys
import os
sys.path.insert(0, os.path.abspath('../../'))
plt.style.use('../../graph.mplstyle')
import plot_config as pcfg
import dolfinx
import mpi4py
import petsc4py
import os
img = mpimg.imread('images/symmetry_central_cracked.png') # or .jpg, .tif, etc.
plt.imshow(img)
plt.axis('off')
(-0.5, 699.5, 1031.5, -0.5)
Import from phasefieldx package#
from phasefieldx.Element.Elasticity.Input import Input
from phasefieldx.Element.Elasticity.solver.solver import solve
from phasefieldx.Boundary.boundary_conditions import bc_x, bc_y, get_ds_bound_from_marker
from phasefieldx.Loading.loading_functions import loading_Txy
from phasefieldx.PostProcessing.ReferenceResult import AllResults
results_folder = "results_center_cracked_force_control"
if not os.path.exists(results_folder):
os.makedirs(results_folder)
def run_simulations(i, a0):
Data = Input(E=210.0,
nu=0.3,
save_solution_xdmf=False,
save_solution_vtu=True,
results_folder_name=os.path.join(results_folder,str(i)))
divx, divy = 200, 600
lx, ly = 1.0, 3.0
msh = dolfinx.mesh.create_rectangle(mpi4py.MPI.COMM_WORLD,
[np.array([0, 0]),
np.array([lx, ly])],
[divx, divy],
cell_type=dolfinx.mesh.CellType.quadrilateral)
def bottom(x):
return np.logical_and(np.isclose(x[1], 0), np.greater_equal(x[0], a0))
def top(x):
return np.isclose(x[1], ly)
def left(x):
return np.isclose(x[0], 0)
fdim = msh.topology.dim - 1 # Dimension of the mesh facets
bottom_facet_marker = dolfinx.mesh.locate_entities_boundary(msh, fdim, bottom)
top_facet_marker = dolfinx.mesh.locate_entities_boundary(msh, fdim, top)
left_facet_marker = dolfinx.mesh.locate_entities_boundary(msh, fdim, left)
ds_top = get_ds_bound_from_marker(top_facet_marker, msh, fdim)
ds_bottom = get_ds_bound_from_marker(bottom_facet_marker, msh, fdim)
ds_left = get_ds_bound_from_marker(left_facet_marker, msh, fdim)
ds_list = np.array([
[ds_top, "top"],
[ds_bottom, "bottom"],
[ds_left, "left"],
])
V_u = dolfinx.fem.functionspace(msh, ("Lagrange", 1, (msh.geometry.dim, )))
bc_bottom = bc_y(bottom_facet_marker, V_u, fdim, value=0.0)
bc_left = bc_x(left_facet_marker, V_u, fdim, value=0.0)
bcs_list_u = [bc_bottom, bc_left]
bcs_list_u_names = ["bottom", "left"]
def update_boundary_conditions(bcs, time):
return 0, 0, 0
###############################################################################
# External Load Definition
# ------------------------
# Here, we define the external load to be applied to the top boundary (`ds_top`).
# `T_top` represents the external force applied in the y-direction.
T_top = loading_Txy(V_u, msh, ds_top)
# %%
# The load is added to the list of external loads, `T_list_u`, which will be updated
# incrementally in the `update_loading` function.
T_list_u = [[T_top, ds_top]
]
f = None
###############################################################################
# Function: `update_loading`
# --------------------------
# The `update_loading` function is responsible for incrementally applying an external load at each
# time step, achieving a force-controlled quasi-static loading. This function allows for gradual
# increase in force along the y-direction on a specific boundary facet, simulating controlled
# force application over time.
#
# Parameters:
#
# - `T_list_u`: List of tuples where each entry corresponds to a load applied to a specific
# boundary or facet of the mesh.
# - `time`: Scalar representing the current time step in the analysis.
#
# Inside the function:
#
# - `val` is calculated as `0.1 * time`, a linear function of `time`, which represents the
# gradual application of force in the y-direction. This scaling factor (`0.1` in this case) can
# be adjusted to control the rate of force increase.
# - The value `val` is assigned to the y-component of the external force field on the top boundary
# by setting `T_list_u[0][0].value[1]`, where `T_list_u[0][0]` represents the load applied to
# the designated top boundary facet (`ds_top`).
#
# Returns:
#
# - A tuple `(0, val, 0)` where:
# - The first element is zero, indicating no load in the x-direction.
# - The second element is `val`, the calculated y-directional force.
# - The third element is zero, as this is a 2D example without z-component loading.
#
# This function supports force-controlled quasi-static analysis by adjusting the applied load
# over time, ensuring a controlled force increase in the simulation.
def update_loading(T_list_u, time):
val = 1.0
T_list_u[0][0].value[1] = petsc4py.PETSc.ScalarType(val)
return 0, val, 0
f = None
final_time = 1.0
dt = 1.0
solve(Data,
msh,
final_time,
V_u,
bcs_list_u,
update_boundary_conditions,
f,
T_list_u,
update_loading,
ds_list,
dt,
path=None,
quadrature_degree=2,
bcs_list_u_names=bcs_list_u_names)
da=0.01
a = np.arange(0.0, 0.95+da, da)
run_simulation_bool = False
if run_simulation_bool:
for i in range(0,len(a)):
run_simulations(i, a[i])
###############################################################################
# Load results
# ------------
compliance = np.zeros(len(a))
E = np.zeros(len(a))
for i in range(0,len(a)):
print(f"Loading results for simulation {i} with crack length {a[i]} mm")
simulation_folder = os.path.join(results_folder,str(i))
S = AllResults(simulation_folder)
compliance[i] = 2*S.energy_files["total.energy"]["E"][0]/S.reaction_files["bottom.reaction"]["Ry"]**2
# %%
# For this symmetric model, the compliance calculated here for the full specimen
# is equivalent to that of a quarter-symmetry model, due to boundary conditions and loading.
# Note: The variable 'a_saved' stores the half-crack length 'a' (not the total crack length 2a),
# which is consistent with the convention used in the documentation and manuals.
a_saved = a
stiffness_complete_model = abs(1/compliance)
# %%
# Save processed results to file
header = ["crack_length", "stiffness"]
data_save = np.column_stack((a_saved, stiffness_complete_model))
save_path = os.path.join(results_folder, "results.elasticity")
np.savetxt(save_path, data_save, fmt="%.6e", delimiter="\t", header="\t".join(header), comments="")
else:
# Load processed results from file
save_path = os.path.join(results_folder, "results.elasticity")
data_loaded = pd.read_csv(save_path, delim_whitespace=True, comment="#")
a_saved = data_loaded["crack_length"].to_numpy()
stiffness_complete_model = data_loaded["stiffness"].to_numpy()
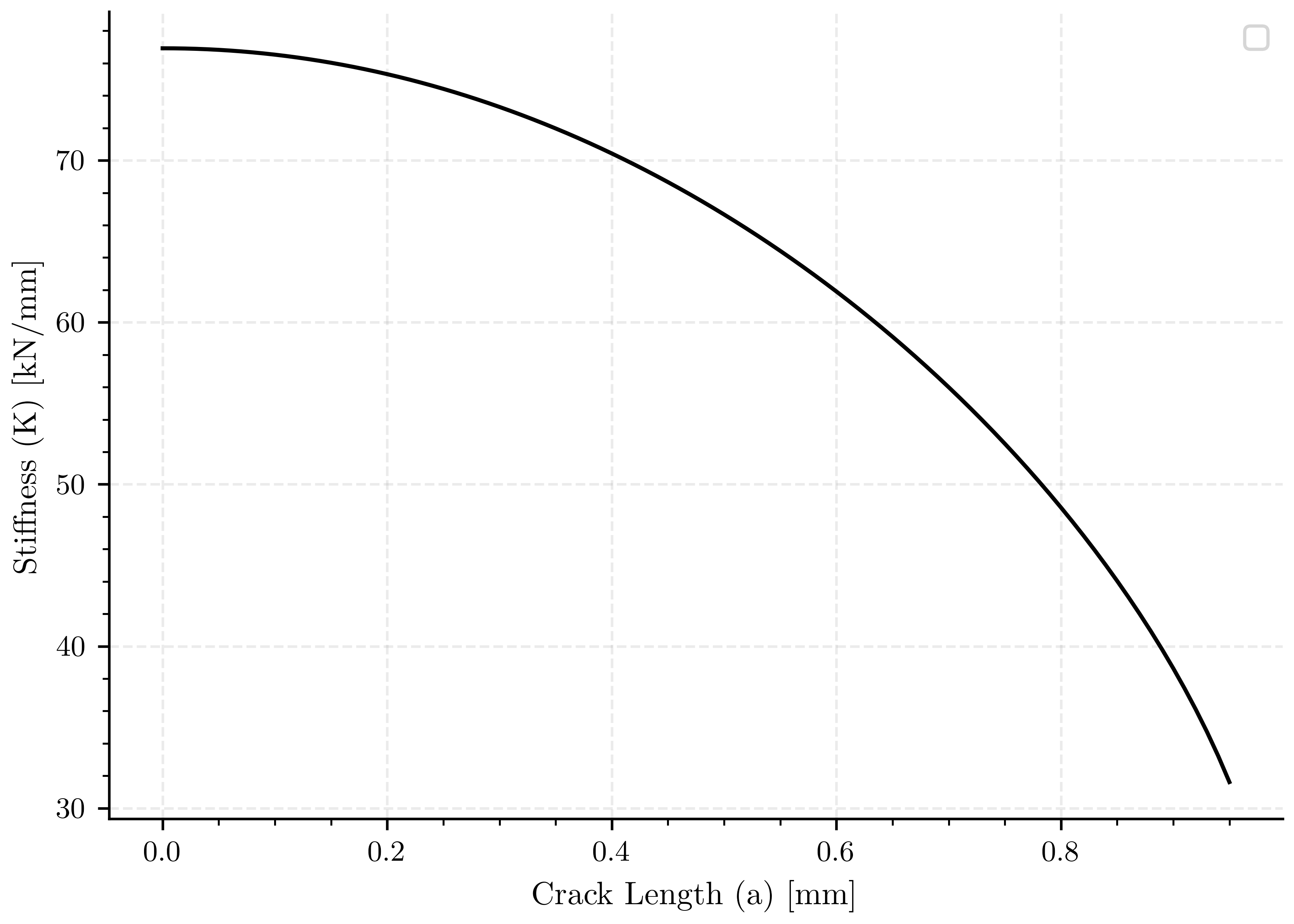
Crack length vs stiffness#
fig, ax0 = plt.subplots()
ax0.plot(a_saved, stiffness_complete_model, 'k-')
ax0.set_xlabel(pcfg.crack_length_label)
ax0.set_ylabel(pcfg.stiffness_label)
ax0.legend()
plt.show()
/home/docs/checkouts/readthedocs.org/user_builds/phasefieldfatigue/checkouts/stable/examples/Elasticity/plot_center_cracked_force_control.py:260: UserWarning: No artists with labels found to put in legend. Note that artists whose label start with an underscore are ignored when legend() is called with no argument.
ax0.legend()
Visualization of Results#
The following section visualizes the mesh and displacement field for two different simulations (indices 20 and 50). The mesh is shown first, followed by the displacement field, which is warped by the displacement vector for better visualization.
pv.start_xvfb()
file_vtu_1 = pv.read(os.path.join(results_folder, "20", "paraview-solutions_vtu", "phasefieldx_p0_000000.vtu"))
file_vtu_2 = pv.read(os.path.join(results_folder, "80", "paraview-solutions_vtu", "phasefieldx_p0_000000.vtu"))
Plot: Mesh#
Display the mesh for the first simulation (index 20).
file_vtu_1.plot(cpos='xy', color='white', show_edges=True)

Plot: Displacement (Simulation 20)#
Warp the mesh by the displacement vector for the first simulation and plot the displacement field.
warped_1 = file_vtu_1.warp_by_vector('u', factor=1.0)
warped_1.plot(scalars='u', cpos='xy', show_scalar_bar=True, show_edges=False)
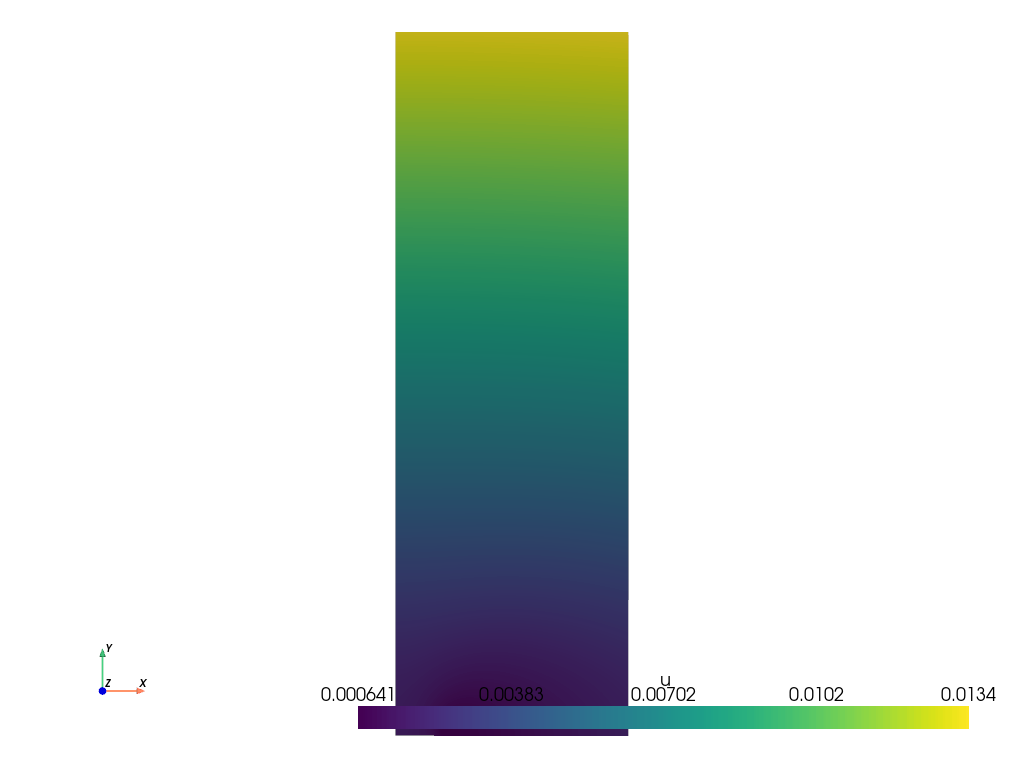
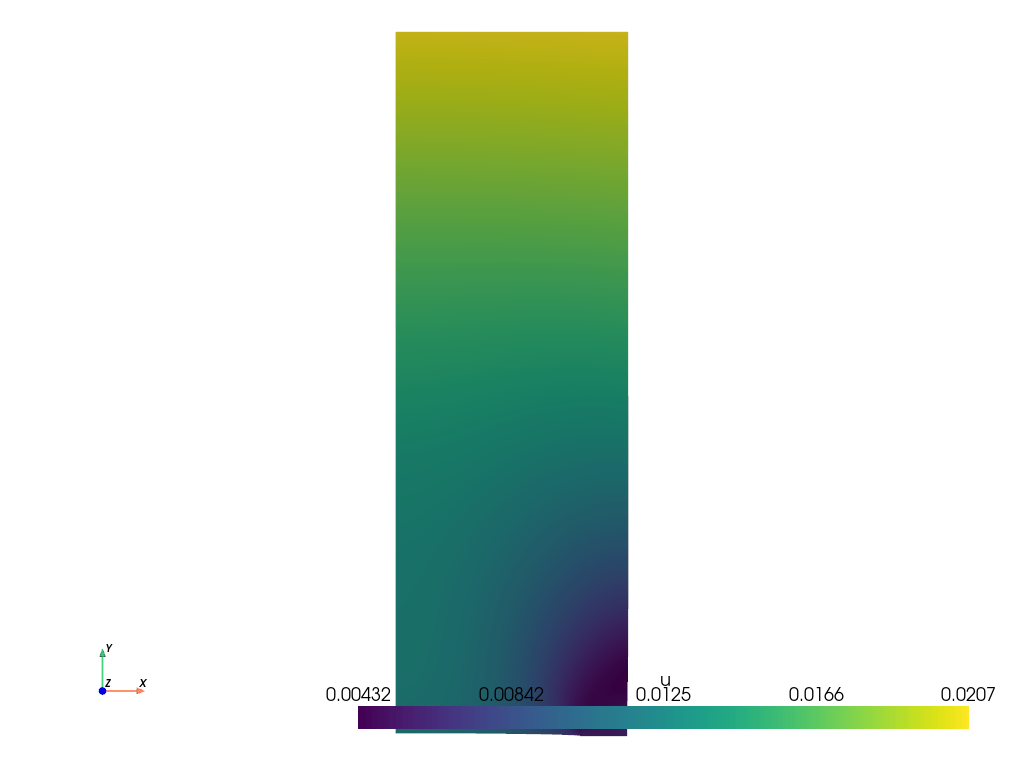
Plot: Displacement (Simulation 50)#
Warp the mesh by the displacement vector for the second simulation and plot the displacement field.
warped_2 = file_vtu_2.warp_by_vector('u', factor=1.0)
warped_2.plot(scalars='u', cpos='xy', show_scalar_bar=True, show_edges=False)
Total running time of the script: (0 minutes 12.003 seconds)